
Intelligent Upper Limb Rehabilitation Exoskeleton
Oct 2024 – May 2025
Final-year project: Low-cost powered exoskeleton for elbow & wrist rehabilitation. SolidWorks design, 20% weight reduction, closed-loop control, remote therapy interface.

7 ft Airbus A350 RC Airliner
Mar 2020 – Feb 2021
7 ft wingspan EDF-powered scale model. Depron foam & carbon fibre, ATmega328P flight controller, 20% weight reduction.

Snake Game on ST Nucleo-L476RG
Mar – May 2024
Full C++ implementation with joystick, LCD display, and buzzer. Real-time peripheral integration.
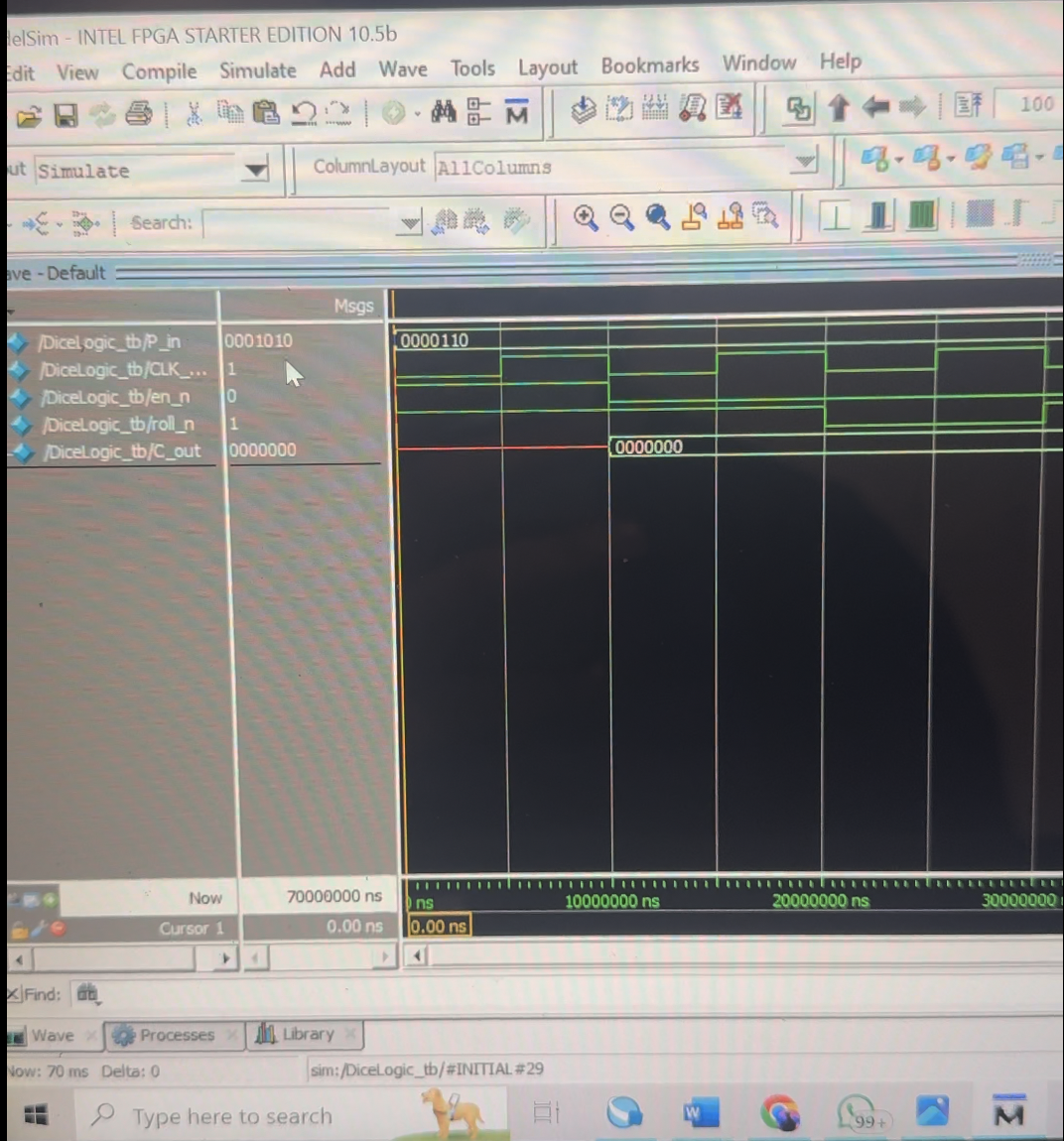
FPGA-Based Electronic Dice Game
Mar – May 2024
Verilog sequential logic design, ModelSim simulation, Quartus synthesis and deployment.

Microcontroller-Controlled Washing Machine Prototype
Mar – May 2023
STM32L476RG control system with cycle selection, sensors, power management, and serial monitoring.
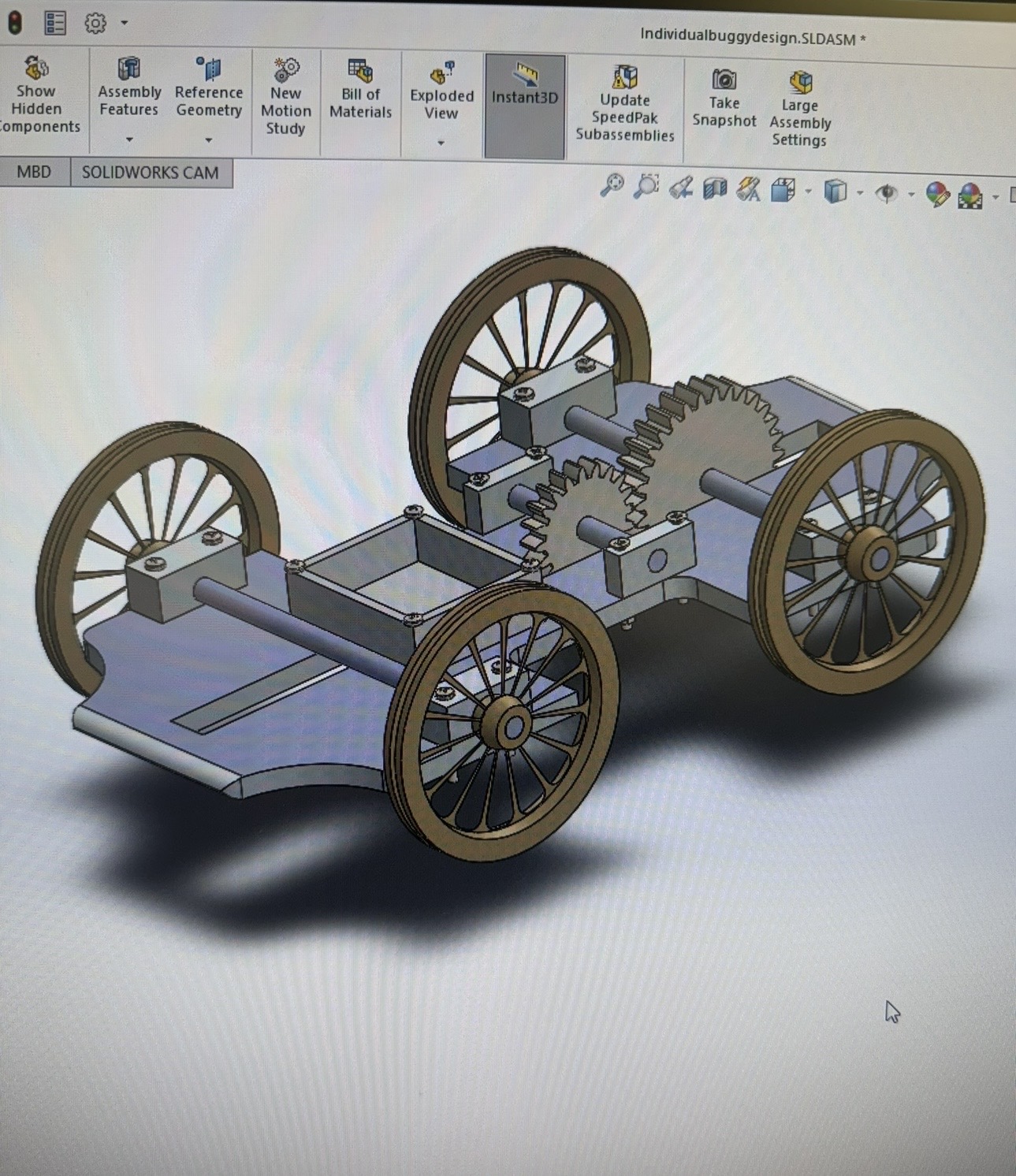
Payload-Capable Mechanical Buggy
April 2024 – May 2024
Designed in SolidWorks and fully 3D printed. Vintage-style four-wheeled chassis with large spoked wheels, gear-driven transmission (meshing spur gears), engineered to carry a 2 kg payload reliably.